Public Member Functions | |
| void | recalculatePositions (VisLinkWLanes linkData, SnapshotLinkWidthCalculator linkWidthCalculator) |
| Point2D.Double | calcPoint (Point2D.Double start, Point2D.Double vector, double distance) |
| void | connect (Map< String, VisLinkWLanes > otfNetwork) |
| VisLinkWLanes | createVisLinkLanes (CoordinateTransformation transform, VisLink link, double nodeOffsetMeter, List< ModelLane > lanes) |
Private Member Functions | |
| Point2D.Double | calculatePointOnLink (final VisLinkWLanes laneLinkData, final double position, final double horizontalFraction) |
| VisLane | createVisLane (ModelLane qlane, double linkLength, double linkScale, double linkLengthCorrectionFactor) |
| double | calculateEuclideanLinkLength (Point2D.Double deltaLink) |
Detailed Description
Definition at line 39 of file VisLaneModelBuilder.java.
Member Function Documentation
◆ recalculatePositions()
| void org.matsim.lanes.VisLaneModelBuilder.recalculatePositions | ( | VisLinkWLanes | linkData, |
| SnapshotLinkWidthCalculator | linkWidthCalculator | ||
| ) |
Definition at line 43 of file VisLaneModelBuilder.java.
References org.matsim.lanes.VisLaneModelBuilder.calcPoint(), org.matsim.vis.snapshotwriters.SnapshotLinkWidthCalculator.calculateLinkWidth(), org.matsim.lanes.VisLaneModelBuilder.calculatePointOnLink(), org.matsim.lanes.VisLinkWLanes.getLaneData(), org.matsim.vis.snapshotwriters.SnapshotLinkWidthCalculator.getLaneWidth(), org.matsim.lanes.VisLinkWLanes.getLinkEnd(), org.matsim.lanes.VisLinkWLanes.getLinkOrthogonalVector(), org.matsim.lanes.VisLinkWLanes.getMaximalAlignment(), org.matsim.lanes.VisLinkWLanes.getNumberOfLanes(), org.matsim.lanes.VisLinkWLanes.setLinkEndCenterPoint(), org.matsim.lanes.VisLinkWLanes.setLinkStartCenterPoint(), and org.matsim.lanes.VisLinkWLanes.setLinkWidth().
Referenced by org.matsim.core.mobsim.qsim.qnetsimengine.QLinkLanesImpl.getVisData(), and org.matsim.core.mobsim.qsim.qnetsimengine.QLinkImpl.hasGreenForAllToLinks().

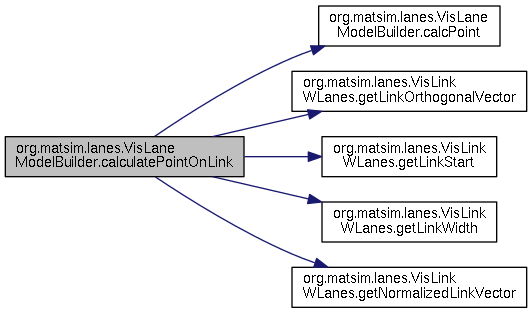
◆ calculatePointOnLink()
|
private |
Definition at line 82 of file VisLaneModelBuilder.java.
References org.matsim.lanes.VisLaneModelBuilder.calcPoint(), org.matsim.lanes.VisLinkWLanes.getLinkOrthogonalVector(), org.matsim.lanes.VisLinkWLanes.getLinkStart(), org.matsim.lanes.VisLinkWLanes.getLinkWidth(), and org.matsim.lanes.VisLinkWLanes.getNormalizedLinkVector().
Referenced by org.matsim.lanes.VisLaneModelBuilder.recalculatePositions().
◆ calcPoint()
| Point2D.Double org.matsim.lanes.VisLaneModelBuilder.calcPoint | ( | Point2D.Double | start, |
| Point2D.Double | vector, | ||
| double | distance | ||
| ) |
Definition at line 87 of file VisLaneModelBuilder.java.
Referenced by org.matsim.lanes.VisLaneModelBuilder.calculatePointOnLink(), and org.matsim.lanes.VisLaneModelBuilder.recalculatePositions().
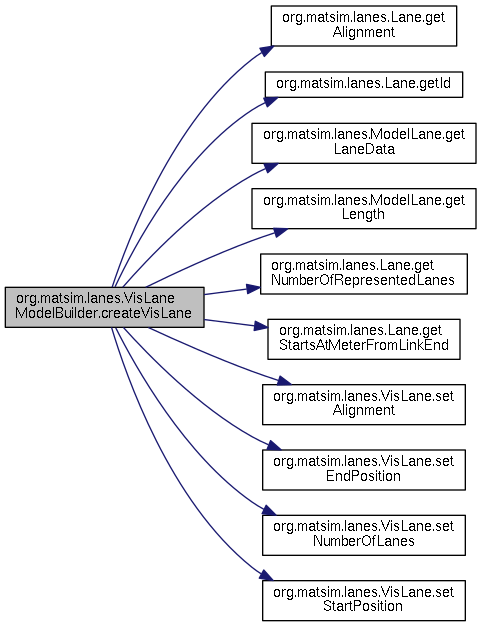
◆ createVisLane()
|
private |
Definition at line 93 of file VisLaneModelBuilder.java.
References org.matsim.lanes.Lane.getAlignment(), org.matsim.lanes.Lane.getId(), org.matsim.lanes.ModelLane.getLaneData(), org.matsim.lanes.ModelLane.getLength(), org.matsim.lanes.Lane.getNumberOfRepresentedLanes(), org.matsim.lanes.Lane.getStartsAtMeterFromLinkEnd(), org.matsim.lanes.VisLane.setAlignment(), org.matsim.lanes.VisLane.setEndPosition(), org.matsim.lanes.VisLane.setNumberOfLanes(), and org.matsim.lanes.VisLane.setStartPosition().
Referenced by org.matsim.lanes.VisLaneModelBuilder.createVisLinkLanes().
◆ connect()
| void org.matsim.lanes.VisLaneModelBuilder.connect | ( | Map< String, VisLinkWLanes > | otfNetwork | ) |
Definition at line 109 of file VisLaneModelBuilder.java.
References org.matsim.lanes.VisLinkWLanes.addToLink().

◆ createVisLinkLanes()
| VisLinkWLanes org.matsim.lanes.VisLaneModelBuilder.createVisLinkLanes | ( | CoordinateTransformation | transform, |
| VisLink | link, | ||
| double | nodeOffsetMeter, | ||
| List< ModelLane > | lanes | ||
| ) |
Definition at line 132 of file VisLaneModelBuilder.java.
References org.matsim.lanes.VisLinkWLanes.addLaneData(), org.matsim.lanes.VisLane.addToLane(), org.matsim.lanes.VisLane.addToLinkId(), org.matsim.lanes.VisLinkWLanes.addToLinkId(), org.matsim.lanes.VisLaneModelBuilder.calculateEuclideanLinkLength(), org.matsim.lanes.VisLaneModelBuilder.createVisLane(), org.matsim.lanes.VisLane.getAlignment(), org.matsim.api.core.v01.BasicLocation.getCoord(), org.matsim.core.utils.collections.Tuple< A, B >.getFirst(), org.matsim.api.core.v01.network.Link.getFromNode(), org.matsim.api.core.v01.Identifiable< T >.getId(), org.matsim.lanes.VisLinkWLanes.getLaneData(), org.matsim.api.core.v01.network.Link.getLength(), org.matsim.vis.snapshotwriters.VisLink.getLink(), org.matsim.api.core.v01.network.Link.getNumberOfLanes(), org.matsim.api.core.v01.network.Node.getOutLinks(), org.matsim.core.utils.collections.Tuple< A, B >.getSecond(), org.matsim.lanes.ModelLane.getToLanes(), org.matsim.api.core.v01.network.Link.getToNode(), org.matsim.api.core.v01.Coord.getX(), org.matsim.api.core.v01.Coord.getY(), org.matsim.vis.vecmathutils.VectorUtils.scaleVector(), org.matsim.lanes.VisLinkWLanes.setLinkOrthogonalVector(), org.matsim.lanes.VisLinkWLanes.setLinkStartEndPoint(), org.matsim.lanes.VisLinkWLanes.setMaximalAlignment(), org.matsim.lanes.VisLinkWLanes.setNormalizedLinkVector(), org.matsim.lanes.VisLinkWLanes.setNumberOfLanes(), and org.matsim.core.utils.geometry.CoordinateTransformation.transform().
Referenced by org.matsim.core.mobsim.qsim.qnetsimengine.QLinkLanesImpl.getVisData(), and org.matsim.core.mobsim.qsim.qnetsimengine.QLinkImpl.hasGreenForAllToLinks().

◆ calculateEuclideanLinkLength()
|
private |
Definition at line 209 of file VisLaneModelBuilder.java.
Referenced by org.matsim.lanes.VisLaneModelBuilder.createVisLinkLanes().
The documentation for this class was generated from the following file:
- lanes/VisLaneModelBuilder.java
